 21.11.2017
21.11.2017



Harder, Better, Faster, Stronger
İnşaat endüstrisinin, değişime direndiğinden, diğer sektörlerde olsa tolere edilemeyecek bir duruşunun olduğundan önceki sayılarımızda1 bahsetmiştik. Buna sebep olarak da genelde şu açıklama ile karşılaşıyoruz: Binanın inşa sürecinde standart olmayan bileşenler ve gerektirdiği işçiliğin yüksek maliyetleri sebebiyle sınırlanıyoruz. Neyse ki akademik ortamda, inşaatta otomasyon üzerine birçok uygulamalı araştırma projesi ve denemeleri yürütülmekte. Bina bileşenlerinin küçük parçalar halinde bir üretim tesisinde imal edildiği ve daha sonra nihai montaj için inşaat alanına taşındığı süreci tarifleyen prefabrikasyon alanında dijital fabrikasyonun etkilerinin görülmesinin sebebi belki de akademideki çalışmalardır. Ama yine de yerinde üretim olarak adlandırılan bina (veya bileşenlerinin) otonom olarak üretim sürecinin, diğer endüstrilerdeki otomasyon seviyesine ulaşması için önünde çok uzun bir yol olduğunu söylemek yanlış olmaz. Otomasyona dair çözüme bazı mimarlar tasarım ve yapım arasındaki dijital süreç zincirinin kırılmasına engel olmak için ihtiyaç duyuyor. Mevcut muhafazakar inşaat endüstrisine inatla bazı mimarlar da yapım sürecini iyileştirmek ve otonom hale getirmek için deneysel malzeme ve bileşenleri kullanmanın ya da bunları deneysel yollarla bir araya getirmenin önemini vurguluyor. Bir de iş sağlığı ve güvenliği standartları kapsamında inşaat alanında otomasyonun gerekliliğine inananlar var. Hepsi bu sayıda!


İnşaat sektöründe otomasyon esasen yeni bir konu sayılmaz. İlk inşaat robotları modüler evlerin prefabrikasyonunda kaliteyi artırmak için 70’li yılların başında Japonya’da tasarlanmıştı. Otomobil üretim süreçleri, gemi inşaatı ve kimya endüstrisinden alınan fikirler inşaat sektörüne uyarlanmıştı. Bir otomobil firması olan Toyota yapım süreçlerinin otomasyonuna öncülük ediyordu. Robotlar püskürtme, beton yumuşatma, malzeme dağıtma, tavana ekipman montajı, kalıp montajı, cephe montajı, boyama ve benzeri özel görevleri yerine getirmek üzere şantiye alanına girmişti. Biz ise bu sayıda Turuncu’nun yakın akrabalarından, dijital olarak kontrol edilen, yerinde üretim, montaj ve fabrikasyon için kullanılan mobilize endüstriyel kollardan bahsedeceğiz. İki mimar olarak ne de olsa yalnızca elimizdekini kullanabileceğiz ve yeni bir inşa robotu da yapabilecek değiliz ya, o halde odaklanmakta fayda var değil mi?
Yerinde robotik üretim için robotları mobilize etmeyi amaçlayan bir dizi araştırma projesi mevcut. Düzenli ve steril ortamlarından koparılıp şantiyenin doğası gereği yapılandırılmamış, sürekli değişen ve nispeten kirli inşaat alanına getirilen robot kolları bir de klasik endüstriyel otomasyon yaklaşımları ile ele alınca önemli bir gelişmenin henüz sağlanamadığını görmek çok da şaşırtıcı olmasa gerek.
Gündemimizdeki ilk örnek ETH Zürih’te bir yüksek lisans dersinin2 parçası olarak inşa edilmiş, 1:1 ölçekli ahşap prototip ve bu bileşenlerin üretimi ve bir araya getirilmesi süreci. Mevcut ahşap üretim hatları, CNC teknolojilerini talaşlı üretim ile küçük parçaların hassas olarak imal edilmesinde kullanır. Bu parçalar daha sonra, daha büyük bileşenleri oluşturmak üzere elle bir araya getirilir. Eversmann, Gramazio ve Kohler’ e göre mekanik ve işlevsel yapı parçalarının elle yapılan montajı sırasında tasarım ve yapım arasındaki dijital süreç zincirinin kırılması gerçekleşir.3 Bu, dijital süreçte yalnızca bazı bilgilerin ve hassasiyetin değil aynı zamanda keşfedilmemiş mekansal, yapısal ve imalat potansiyellerinin de kaybına yol açabilir. Dijital işlemin sürekliliğini test etmek adına, ders kapsamında iki katlı bir ahşap kulübenin strüktürünü ve dış kabuğunu imal etmek ve daha sonra yerinde monte etmek için bir robotik düzenek oluşturulmuş, farklı büyüklüklerdeki işlenmemiş malzemeyi tanımlamak ve bu veriye uygun tepki verip modeli uyarlamak üzere bir geribildirim sistemi kurulmuştur. Bir çizgisel aks üzerinde iki endüstriyel robot kolun yanı sıra, hücrenin içinde malzeme besleme istasyonu, kesme prosedürü sırasında malzemeyi ortalamak ve sabitlemek üzere paralel pnömatik bir gripper, servo motorlarla donatılmış üç eksende kontrol edilebilir bir CNC testere ve kalasları sabitlemek için entegre alüminyum rayları olan özel tasarlanmış bir kesim masası kurgulanmıştır. Birbirinden farklı 4.000 parçanın üretimi mevzubahis olunca bu şekilde etkileşimli bir düzeneğin kurulmasına duyulan ihtiyacı elbette sorgulamıyoruz. Strüktürünün prefabrikasyon süreci şu şekildedir: Montaj masasına latalar yerleştirilir ve robot başlama pozisyonuna hareket eder. Ardından robot, kirişi kavrar ve onu programlandığı şekilde kesilmesi üzere döner testereye doğru hareket ettirir, sonrasında kiriş makası oluşturmak üzere strüktürde yerini alır ve el ile tespiti yapılır. Ölçüm verileriyle geometrinin yeniden hesaplanması ve işlemi küçük toleranslar dahilinde dijital ve fiziksel model arasında uyarlayıp malzemeyi belirli açılardan kavraması, farklı uzunluklarda kesmesi ya da farklı derinliklerde delmesini sağlayacak algoritmayı varın siz düşünün. Ancak bu şekilde bir işleyiş beş hafta içinde 4.000 farklı parçanın üretilip test edilmesi ve yerinde montajını mümkün kılabilir.
Peki şantiye ortamı böylesine strüktüre olabilecek bir yere dönüşebilir mi? Belki de robotlarla işbirliğiyle üretim tam da bu nokta da etkili olacaktır; işçiler bilişsel işleri gerçekleştirirken robotlar da verilen görevleri hassasiyetle yürütür. Uygulama (as-built) çizimlerine, ince işler şefinin bir önceki yanlışı kapatmak üzere detay üretme zorunluluğuna, yetişmeyen teslim tarihlerine son! Robotlar ile daha insancıl bir çalışma ortamı mümkün mü? Eh, gerçekten de tehlike çanları ile beklediğimiz Skynet’ten pek de farklı bir gelecek.
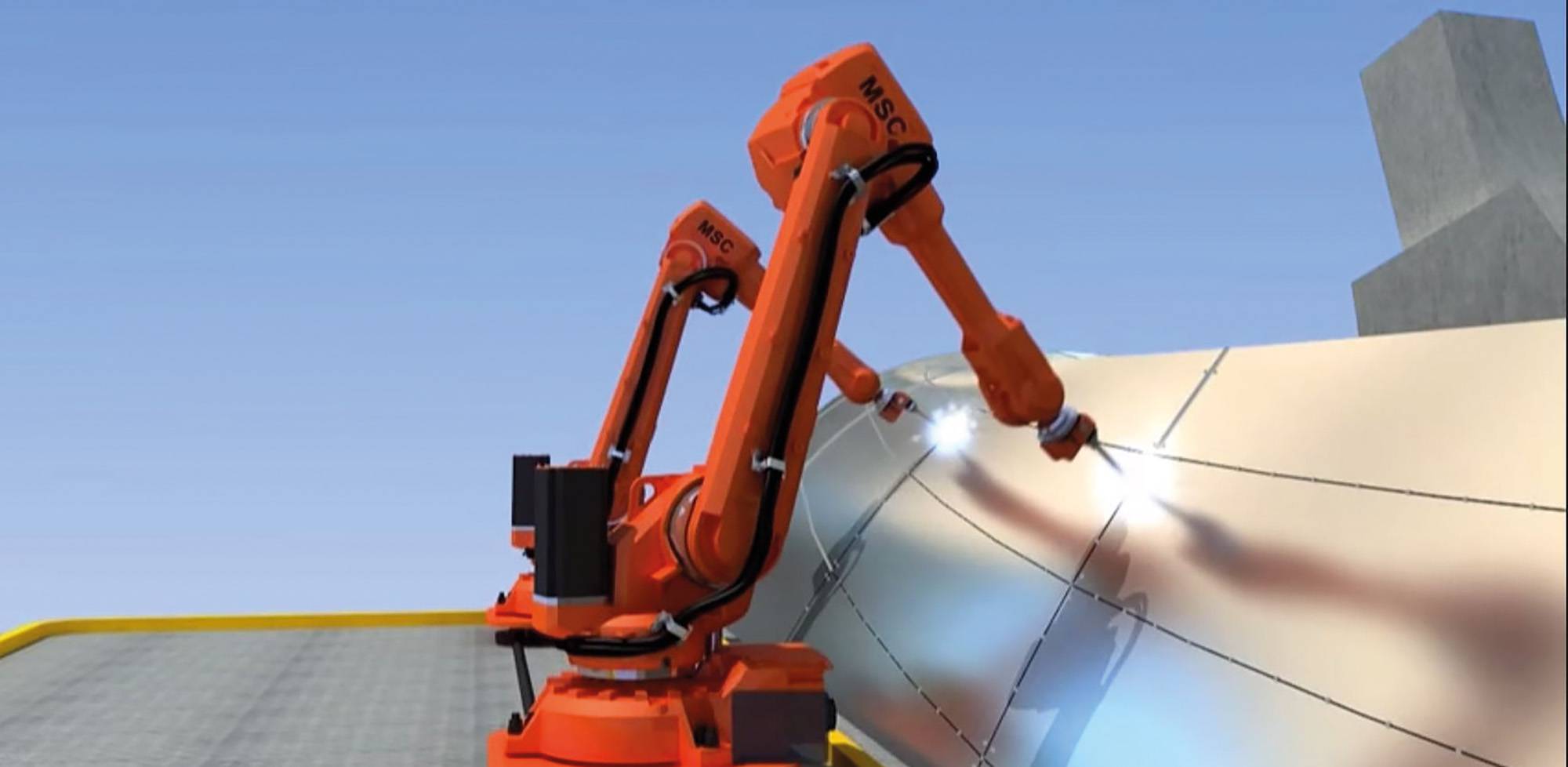
Yapım sürecini iyileştirmek için yapısal bileşenleri deneysel bir şekilde bir araya getirmenin bir yol olduğunu düşünenler arasında Wolf Prix de var. Shenzen’deki Museum of Contemporary Art and Planning Exhibition (MOCAPE) projesi için “Cloud” olarak adlandırılan merkezi dolaşım hacminin iç cephesini monte etmek üzere Çin merkezli bir cephe firmasyla robot kolların kullanımı öneriliyor. Öneride ağır imalat montaj hatlarından tanınan, standart robotik bileşenler kullanılıyor. Prosedür şu şekilde: İlk olarak mekanik bir pres metal panelleri şekillendiriyor (standart teknik). İnşaat alanına getirilen paneller, mekanik vinç platformlarınca kaldırılan mafsallı robot kollardaki entegre uç elemanı ile yerleştiriliyor, kaynatılıyor ve parlatılıp cilalanıyor.
Her ne kadar müşteri Cloud’un robotik imalat planını iptal edip bunun yerine metal panelleri geleneksel yöntemlerle bir araya getirmeyi tercih ettiyse de çalışma ücretlerinin oldukça düşük olduğu bir ülkede bu yöntemleri denemek bile belki de gerçekten etkili bir inşaat metodu olduğunun bir göstergesidir. Bu hikayenin arkasında bir de acı gerçek var ki; eğer portföylerinde milyonlarca metrekarelik binanın bulunduğu tanınmış mimarlar, inşaat şirketlerini veya müşterilerini robotik montaj uygulamalarına ikna edemiyorsa, biz geri dönüp kum havuzunda yuvarlanmaya devam edelim ve geçici bir pavyon inşa ettiğimizde de buna zafer diyelim.
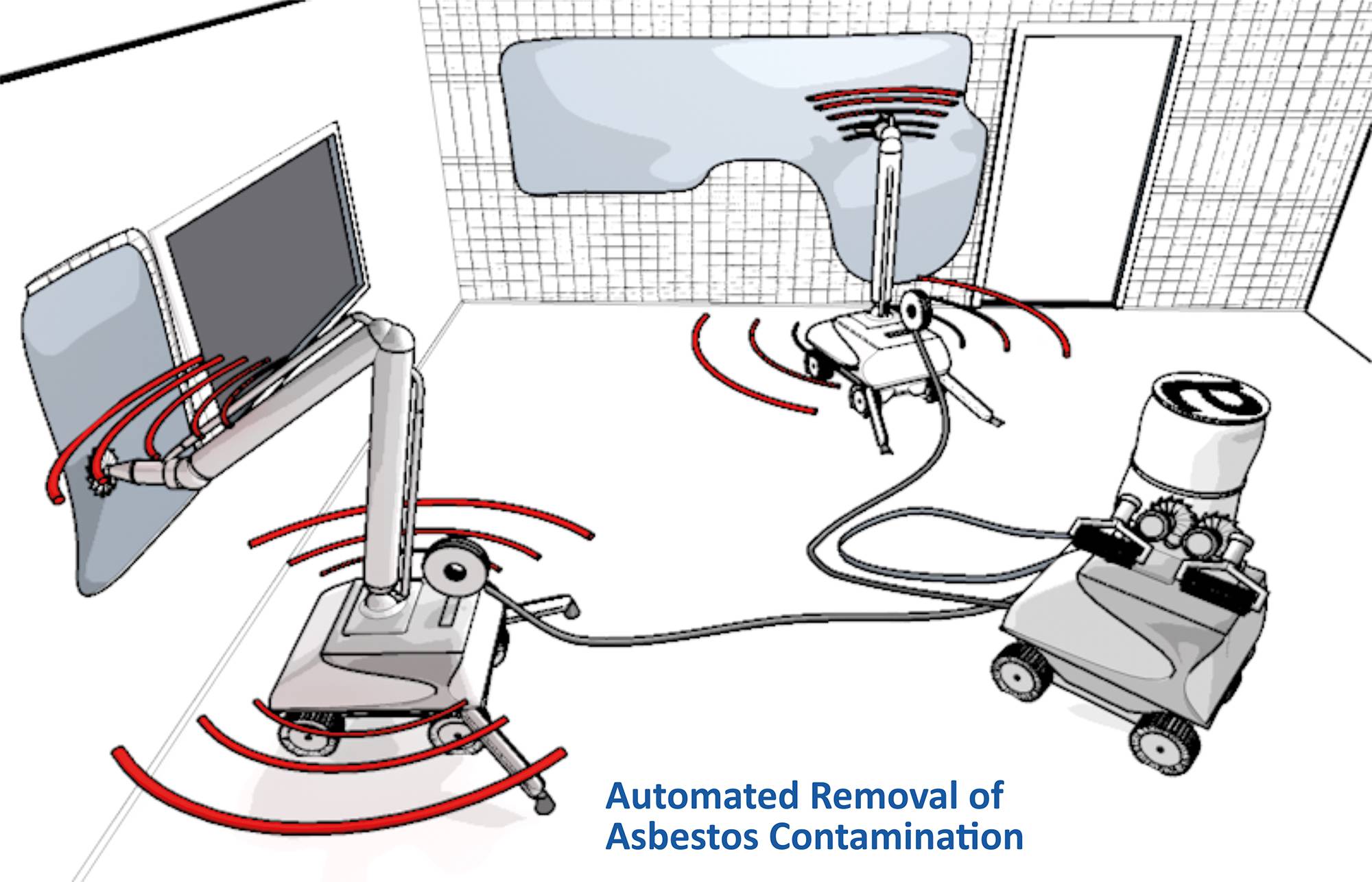
Robot kolun bir idiot savant olduğundan, fakat tekrar eden görevlerde oldukça iyi ve en yalın halinde iken tercihen insansız ortamlarda çalıştığından da bahsetmiştik.4 İnşaat alanında tam da bu nitelikleri taşıyan eşsiz bir iş tanımı var. “Robots to Re-Construction”5 Bots2ReC projesi, asbest kirliliğinin otomasyona bağlı şantiyelerde mobil robotik üniteleri kullanarak giderilmesini hedefler. Yıkım endüstrisinde işlerin çoğu, makine veya el aletleri kullanılarak çalışanı yüksek toz, ses ve titreşime maruz bırakan elle işletilen operasyona dayalıdır. Asbest liflerine maruz kalmak ise insanlar için oldukça tehlikelidir; bu nedenle, bu alanda çalışanların sağlığını riske atmamak için yoğun güvenlik tedbirleri alınmalıdır. Bots2ReC projesi, “Gerçek bir rehabilitasyon alanında asbest kontaminasyonun otonom robotik sistemler ile giderileceği operasyonel süreci tanıtmak, test etmek ve doğrulamak” amacıyla başlatılmıştır.6 Taslakta da görüldüğü gibi, her bir ünite mobil platform üzerindeki robot kollara takılan kazıyıcı uç elemanından oluşuyor. İşleyiş sırasında çevrenin algılanması ve yerel bildirimlerin alınması için optik ve radar sensör sistemlerinin kombinasyonu kullanılmış. Son olarak operatörün rehabilitasyon alanının sanal temsili üzerinde farklı alanlar seçebileceği ve otonom olarak yürütülecek görevleri atayacağı bir kullanıcı arabirimi eklenmiş.
AB Horizon 2020 Araştırma ve İnovasyon Programı tarafından desteklenen Bots2ReC projesinin konsorsiyumunda farklı uzmanlığa sahip yedi şirket var. Aralarında hiç mimar yok. Belki de bu yüzden gerçek dünyada tasarladıkları üniteler taslaktakine çok da benzemeyen mekanlarda görevini yerine getireceğinden, 70-80 cm enindeki koridorlarda ya da küçük mekanlarda döşemedeki, duvardaki ya da tavandaki asbesti temizlemek üzere tekrar boyutlandırılıyor. Zaten ne en alımlı rendere ne de en viral animasyona sahip proje robotların inşaat alanındaki kullanımları için kırılma noktası olacak. Büyük ihtimalle bütün heyecan verici olasılıkların ışıltısı arasında gözden kaçırdığımız, ama bir çözüme çok ihtiyacımız olan bir problem başlangıç noktamız olacak.
Daha sert, daha iyi, daha hızlı, daha güçlü7 – robotlar güvenlik, tekrarlanabilirlik ve yüksek hassasiyet ile ilgili işlerde sivrilmişler. Tasarımcı olarak robotlar için yenilikçi mekanik tasarımlar ya da inovatif kinetik hesaplamalar geliştirmek ile yükümlü değiliz. Görevimiz malzemenin manipulasyonu sürecinde dahil olmak. Tasarımcıların şu an için endüstriyel robot kollar gibi daha genel kinetik manipulatörler ile çalışması tamamen anlaşılabilir bir durum. Ancak geleceğin inşaat robotlarının geliştirilmesi sürecine dahil olmamamız durumunda, sadece çok tanımlı bir iş için fazlasıyla mühendisçe çözülmüş ancak farklı işler için tamamen kullanışsız çözümler kullanmak zorunda kalacağız.
NOTLAR
1 Konu hakkında daha fazlası için, Turuncu Elektrikli Tuğla Düşler mi? Mayıs 2017, XXI.
2 Master of Advanced Studies in Architecture and Digital Fabrication of the NCCR Digital Fabrication.
3 Eversmann, P., Gramazio, F., & Kohler, M. (2017). Robotic prefabrication of timber structures: towards automated large-scale spatial assembly. Construction Robotics, 1-12.
4 Konu hakkında daha fazlası için, Robotunu Nasıl Eğitirsin? Haziran 2017, XXI.
5 http://www.bots2rec.eu/index.html
6 Detert, T., Eddine, S. C., Fauroux, J. C., Haschke, T., Becchi, F., Corves, B., Guzman, R., Herb, F., Linéatt, B., & Martin, D. (2017). Bots2ReC: introducing mobile robotic units on construction sites for asbestos rehabilitation. Construction Robotics, 1-9.
7 Selam Daft Punk. ^


İlgili İçerikler:
-

Taş Kalıntıya Müdahale: Ahşap Tasarım ve İnşaat Atölyesi
-
Dijitalleşen Tasarımda Seçenek Felci
Müşkülpesent adlı köşesinde Sabri Gökmen bu kez pratiği gittikçe dijital araçlarla belirlenen mimarın uğradığı seçenek felcini kaleme alıyor.
-
Covid-19 Karantinası : Mimarın Araçlarına Paralaks Bir Bakış Ortamı
Aslı Yalçın Covid-19 pandemisiyle birlikte mimarın teknolojiyle ilişkisinde virtüel flanör ve dronör rollerini sorgulayarak transhümanist olasılıkları ortaya seriyor.
-

Mekanın Doğası
-
Kökenin İnşası
-
Mimarın Laboratuvarı
-
Docendo Discimus* Instrumantae
Dijital fabrikasyon üzerinden mimarlık eğitimini bir süredir eleştirmekteyiz ve bu konu hakkındaki kendi önerimizi sunma zamanı sonunda geldi.
-
Siber-Fiziksel Bir Mimarlığa Doğru
Köşe yazılarımızın üstünden geçerken fark ettik ki Achim Menges ve ICD Stuttgart’ın işlerini hep anmış, hiç detaylıca bahsetmemişiz.






