Tasarımdan uygulamaya geçişte tipik bilgi akışının doğrusal, çoğu zaman da tek yönlü olduğu varsayılır. Genellikle bir prosedürün üretimine yönelik son adım, satırlar ve kapsamlı talimatlar dizisi içeren bir G-Code’dur. Malzemenin anlık davranış biçimi, çalışma ortamının fiziksel koşulları veya bir kişinin varlığı, tek yönlü sayısal akışta herhangi bir geribildirim sağlamaz, dolayısıyla tasarım sürecine katkısı olamaz. Ancak insanlar bir şey yaparken durum böyle değildir. Bedenleşmiş biliş, yapma esnasında esas olandır. Çoğu zanaatkar için, kullandıkları araçlar ve etkileşimde bulundukları malzemeler, belirli bir görevde mükemmellik yönünde güncellenmiş uzuvlarıymışçasına vücutlarının doğal bir uzantısı haline gelmiştir. Ya robotların veri işleyişini Jacquard Loom’un delikli kartlarına benzetmeye çalışmazsak ne elde ederiz? Makine/robot sadece önceden belirlenen talimatları gerçekleştiren “savant”ı2 oynamaktan vazgeçer ve hisseder, tepki verir ve malzemenin durumuna bağlı olarak harekete geçerse ne olur? Böyle bir süreç, malzemeyi sadece önceden tanımlanmış bir şekle evrilen hammadde, makineyi komutların uygulayıcısı, insanı sadece bir operatör, çalışma ortamını ise sadece sahne olarak ele alamayacağımızı önermekte.
Bu sayıda, talimat temelli yapmadan davranış temelli yapmaya geçiş ve sanal yapma sürecinin fiziksel artefakta nasıl dönüştüğüne değineceğiz. Bu yaklaşım, somutlaştırma üzerinde her zaman formun tanımlanmasına öncelik veren, yerleşmiş tasarım süreci anlayışının alışılmış hiyerarşisinin üstesinden gelmemizi sağlayabilir. Hesaplamalı form oluşturma ve bilgisayar destekli somutlaştırmanın yakınsadığı bu noktayı, ilk örneklerini inceleyerek değerlendireceğiz.
Başlangıç olarak mimaride hesaplamalı tasarıma geçiş için bilgisayarı bir dijitalleştirme aracı olarak görmemek gerekir. Fiziksel ortamda ise bu tanım, dijitalleştirmeden Achim Menges’in ortaya çıkardığı “hesaplamalı yapma”3 ya da Axel Kilian’ın değindiği “somutlaştırılmış hesaplama”4 yönünde genişletilmelidir. Menges, mimaride ileri dijital üretim tekniklerinin bile, tanımlanmış tasarımdan malzemenin tezahürüne dek olan sürecinin tek yönlü olduğunu, bunun da üretim sürecini ancak dijitalleştirilmiş yapma düzeyine çıkardığını söylüyor. Bunun aksine, gerçek hesaplamalı üretim süreci, siber/fiziksel geribildirim tarafından yönlendirilen, yalnızca somutlaştırmadan ziyade tasarım sürecini genişleten bir keşif sürecinin ortaya çıkmasını gerektirir. Buna paralel olarak Axel Kilian, biçimsel manipülasyonun, yukarıdan inme statik işleme yöntemlerinden vazgeçip robot ya da insan eyleminin yalnızca operasyonun bir parçası olduğu ve değişikliklerin eylemi tamamlamak üzere yapılan işlemlerden kaynaklandığı üretim yöntemine doğru kaymasını, somutlaştırılmış hesaplama terimiyle açıklıyor.
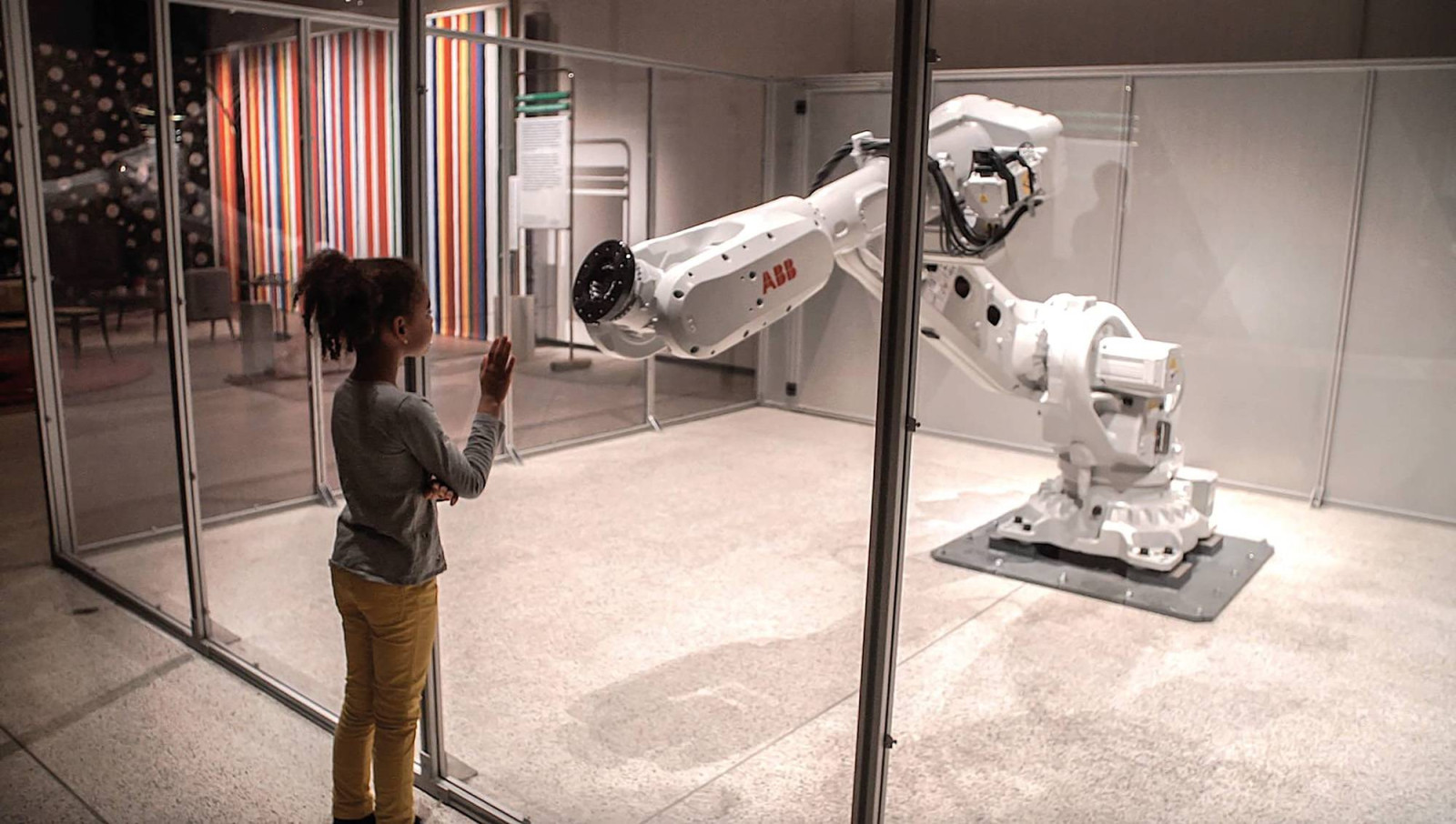
“Turuncu”muzu sevdiğimiz doğrudur, fakat gerçeği olduğu haliyle kabul etmekte fayda var; kendisi bir idiot savant. Ona verilen ve özellikle hafıza gerektiren işleri yapmakta oldukça iyiyken insanların bulunduğu sosyal ortamlara çok da adapte olamıyor. Yalnız ya da aynı durumu paylaşan diğer robotlar ile daha iyi çalışıyor. Bizim Turuncu’ya benzer robotların ötesine geçen yeni jenerasyon, daha gelişmiş özelliklere sahip robotlar (ve daha iyisi için daha akıllı bir ortamda), üretim sürecinde neler olup bittiğini anlamak ve görevini yerine getirmek için daha uygun olacak. IIWA (Intelligent Industrial Work Assistant) -akıllı endüstriyel iş asistanları- adıyla markete sürülen bu yeni nesil robotlar, kuvvet-tork sensörleriyle donatıldı. Yakın zamanda yayınlanmaya başlayan Endüstri 4.0 reklamlarında onları, yanlışlıkla bir insana değdiğinde dururken ya da el ile tarif edilen bir rotayı öğrenirken (daha çok tekrar ederken) görüyoruz. Bununla birlikte olasılıklar, robotlar ve insanlar için sadece ortak bir çalışma ortamı oluşturmaktan veya robotunuzdan mekanik bir papağan ortaya çıkarmaktan çok daha heyecan verici. Bu öngörü, robotun, bir zanaatkar gibi malzemenin yanı sıra çalışacağı alanın da bilişsel yönlerini öğrenerek bu alanın bir parçası olmasını sağlar. Robotların kullanımının uygun ve hatta elzem oluşunu duyuran fenomen mimarideki uygulamalar için de umut ve heyecan verici.

RWTH Aachen Üniversitesi’nin Individualized Production in Architecture grubundan DIANA (Dynamic & Interactive Assistant for Novel Applications) ekibi, şantiye gibi yapılandırılmamış bir ortamda robotları dinamik asistanlar olarak kullanmayı önermekte. İnşaat alanı, robotların evrensel uygulanabilirliği için nihai stres testi olarak görülebilir. İş gücündeki uzmanlık seviyesinin düşük olması sebebiyle inşaat alanında robot kullanımı ve yapı üretimine dair görevlerini yerine getirmek üzere programlanması, kalibre edilmesi teknik arka plan gerektirmemeli. Bu sebeple DIANA ekibi, öğretme sürecini güdümlü hale getirmeyi öneriyor. Robot kol, insan meslektaşı ile dokunsal ve görsel seviyede etkileşim kuruyor. Kullanıcı IIWA'yı tutup manuel rehberlik yapıyor, bu sırada IIWA hareketleri yakalayıp üretim süreci hakkında bilgi sahibi oluyor. 2016 yılında KUKA İnovasyon ödülü adayları arasına giren bu projede robot kol, bir besleme istasyonundan ahşap çubukları alıyor, tasarım için gerekli kesit uzunluğunu hesaplıyor ve çubuğu bir hızar yardımıyla ihtiyaç duyulan uzunlukta kesiyor. Sonrasında çubuğu dijital modelden öğrendiği yaklaşık konumuna getiriyor, sürükleyerek tam konumuna getirip kuvvet-tork sensörleri ile düşüşü hissettiği noktada yerleştiriyor. Tam da bizim, ışıklar yokken el yordamıyla bir şeyler yapmaya çalıştığımızdaki gibi tüm işlem, önceden tanımlanmış talimatları harfiyen takip etmektense, dokunsal veri ile birleştirerek tamamlanıyor.
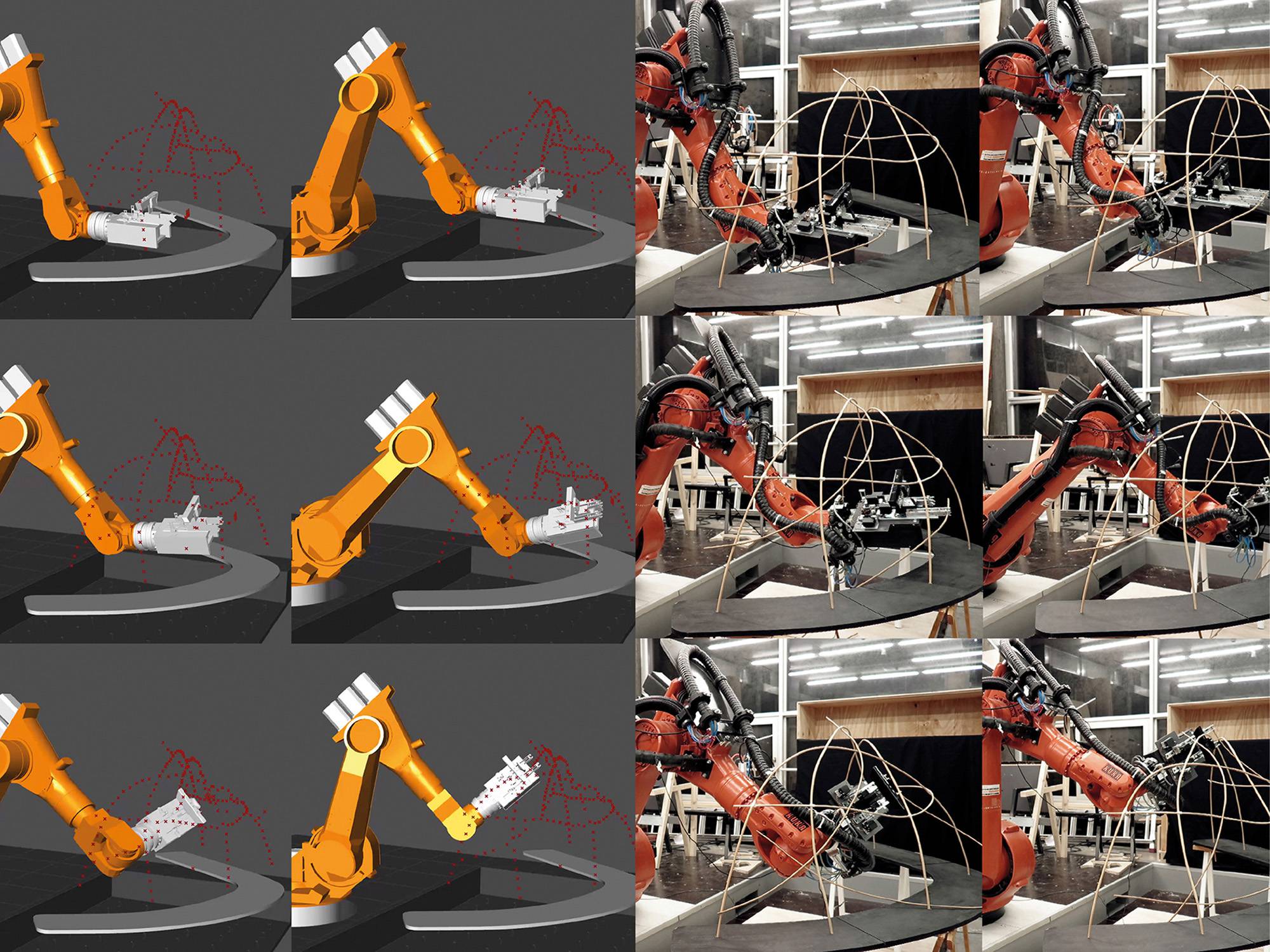
Bir başka değineceğimiz proje ICD’den bir yüksek lisans tezi. Herkesin IIWA’sı olacak değil. Etkileşim için Turuncu’muz gibilere sensörler aracılığıyla veri akışını sağlayan sistemler entegre edilebilir. Giulio Brugnaro, Robotic Softness5 isimli projesinde dokuma ile oluşturulan bir mekanın davranışsal üretim sürecini ve robotik kolun doğrusal üretim sürecinin bir parçası olarak değil de daha ziyade bir “soft system”6 elemanı olarak kullanımını araştırıyor. Sanford Kwinter tarafından dile getirilen bu terim esnek, uyarlanabilir ve gelişen, bunun yanı sıra yoğun bilgi ağı ve geribildirim döngüsüne dayanan bir sistemi ifade ediyor. Bu projedeki tasarım ve üretim sürecinin ana bileşenleri şu şekilde sıralanabilir: Çevrimiçi etken tabanlı bir sistemden oluşan uyarlanabilir robotik üretim alanı, özel üretim dokuma için tasarlanmış uç elemanı ve üç boyutlu tarama teknolojisini kullanan koordine edilmiş bir algılama sistemi. Bu tür bir entegrasyon tasarımının, duyusal bilgilerin sürekli akışıyla haberleşen üretim ile aynı anda oluşabilme ihtimalini ortaya çıkarmakta. Açık talimatlara ve tahmini modellemeye güvenmek yerine, dijital model, ham nokta bulutu verilerini fiziksel modelden alarak üretimin bir sonraki aşamasını bilgilendirmek üzere dijital modeli kendiliğinden günceller. İmajda da görüleceği üzere “soft system”, koordine edilmiş iki geribildirim döngüsünden oluşur. Biri küresel, diğeri de yerel düzeyde birbirlerini gerçek zamanlı olarak bilgilendirirler. Bu da her yerleştirilen çubuğun fiziksel özellikleri sebebi ile değiştirdiği prototipi, her işlem sonrasında dijital ortamda güncelleyerek bir sonraki hareketi bilgilendirir.

Son olarak değinmek istediğimiz proje, Avrupa Birliği’nin desteklediği İnsan-Robot etkileşimi araştırmaları çatısındaki Echord içinden EXECELL7 (Experimental Evaluation of Advanced Sensor-Based Supervision and Work Cell Integration Strategies-Gelişmiş Sensör Tabanlı Gözetim ve İş Hücresi Entegrasyon Stratejilerinin Deneysel Değerlendirmesi) projesi. Çeşitli koşullar altında insanları ve diğer nesneleri üç boyutlu olarak tespit eden sensörler ile donatılmış hacim içinde, algıladığı duruma göre farklı eylemler gerçekleştiriyor. Emniyet hacimlerinin dinamik, çevrimiçi planlanması ve izlenmesi için bir algoritma kullanan sistem güvenlik hacimlerini tanımlarken KUKA LWR'nin hareketini hesaba katıyor ve robotun daha düşük bir hızda tepki vermesi veya tamamen durması gereken durumları tespit ediyor. Aynı zamanda robot kolun çalışacağı yörüngeyi ve sonraki adımlarını çalışma alanına yansıtarak meslektaşlarını bilgilendiriyor.
Tasarım ve üretim süreçlerinin ayrı değil, bir olduğunu her fırsatta savunuyoruz. Ufukta gördüğümüz, tasarım sürecinin üretimin öncüsü değil, somutlaştırmaya uzanan alternatif bir üretim yaklaşımı olmasıdır. Aralarında herhangi bir etkileşim olmayan, sıralı ilerlemeler yerine doğrusal olmayan, birinin diğerini gölgelemediği, deneysel süreçleri keşfetmemiz gerektiğini düşünüyoruz. Deneysel süreçlerin keşfinden bahsetmişken, kimler işbirliğine hazır? Haydi, robotları gerekli ekipmanlarla, kendimizi de yeni bir bakış açısıyla donatıp daha iyi bir etkileşim için onları hücrelerinden salıverelim.
NOTLAR
1 Her zamanki gibi referans vermeyi çok seviyoruz: “How to Train Your Dragon”
2 bkz. Savant Sendromu (idiot savant) Ağır düzeyde gelişimsel ya da zihinsel yetersizliklerin yanında çoğu insanda bulunmayan sıra dışı zihinsel becerileri olan kişileri tanımlar.
3 Menges, Achim. "The New Cyber Physical Making in Architecture: Computational Construction." Architectural Design 85.5 (2015): 28-33.
4 Johns, Ryan Luke, Axel Kilian, and Nicholas Foley. "Design approaches through augmented materiality and embodied computation." Robotic Fabrication in Architecture, Art and Design 2014. Springer International Publishing, 2014. 319-332.
5 Brugnaro, Giulio; Baharlou, Ehsan; Vasey, Lauren; Menges, Achim. 2016. Robotic Softness: An Adaptive Robotic Fabrication Process for Woven Structures. In "ACADIA // 2016: POSTHUMAN FRONTIERS: Data, Designers, and Cognitive Machines [Proceedings of the 36th Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA)": pp. 154-163.
6 Kwinter, Sanford. "Soft systems." Culture Lab 1 (1993): 208-227.
7 EXECELL-Experimental Evaluation of Advanced Sensor-Based Supervision and Work Cell Integration Strategies: http://www.echord.info/wikis/website/execell.html
Sayı
Haziran 2017
XXI Haziran sayısında sanat ile kent arasındaki karşılaşmaları ve ilişkilenme biçimlerini ele aldığımız dosyamız var. Ahmet Doğu İpek, Can Altay, Merve Ünsal ve Sinan Logie ile bir araya geldiğimiz dosyada kent ve sanat arasındaki etki-tepki ortamını ve gelecekte bu ilişkinin izleyebileceği yeni rotaları konuştuk. YIYU Design tasarımı AVIC Park projesi, Emir Drahşan + Alexandre Schrepher tasarımı Narköy projesi, Mecanoo Architecten’in tasarladığı Villa Industria, AZL Architects’in Shitang İnternet Konferans Merkezi, Superimpose Architecture tasarımı Micr-O, Farming Studio’nun Kent Balkonu da bu sayımızda. Ayrıca Esra Kahveci’nin çağdaş tartışmalar içinde arşiv kavramı ve teknoloji aracılığıyla üretilen yeni ilişkiler üzerinden ele aldığı Arşiv Rüyası sergisi hakkındaki yazısını ve Erdem Ceylan’ın “Heidegger’in Kulübesi” kitabından yola çıkarak yazdığı Ex Libris köşemizi de Haziran sayımızda okuyabilirsiniz.